


Robot Delta D3PM-1600-P15
Característica do produto
Característica
1 、 O tempo de ciclo estándar é inferior a 0,6 s, co que se busca a alta velocidade e o volume mínimo.
2 、 O deseño avanzado do motor de rotación na plataforma móbil permite que o robot alcance facilmente unha alta precisión de rotación.
3、O robot é ideal para operacións de espazo estreito, así como para alta velocidade e alta precisión en campo 3C.Amplamente utilizado na montaxe, manipulación e proba de pequenas pezas de traballo.
Parámetros do produto
| Tipo | D3PM-1600-P15 | |
| Machados | 3+1 | |
| Carga útil | 15 kg | |
| Manipulador | Peso | 131 kg |
| Diámetro | 1600 mm | |
| Repetibilidade | Posición | 0,05 mm |
| Rotación | 0,025 ° | |
| Velocidade máxima | 300 pp/min | |
| Rango de rotación | ± 360 | |
| Momento de inercia máximo permitido | 0,224 kg .m2 | |
| Rango angular do brazo accionado | Arriba | 23,5º |
| Abaixo | 71,5º | |
| Fonte de alimentación | Trifásico 380 VCA -10%~+10%, 49~61HZ | |
| Capacidade de potencia | 10 KVA | |
| Potencia nominal | 6,2 kW | |
| Temperatura de almacenamento | -10 ℃ ~ 70 ℃ | |
| Ambiente de traballo | -10℃~50℃,RH≤80% | |
| Protección | IP55 | |
Debuxo do produto
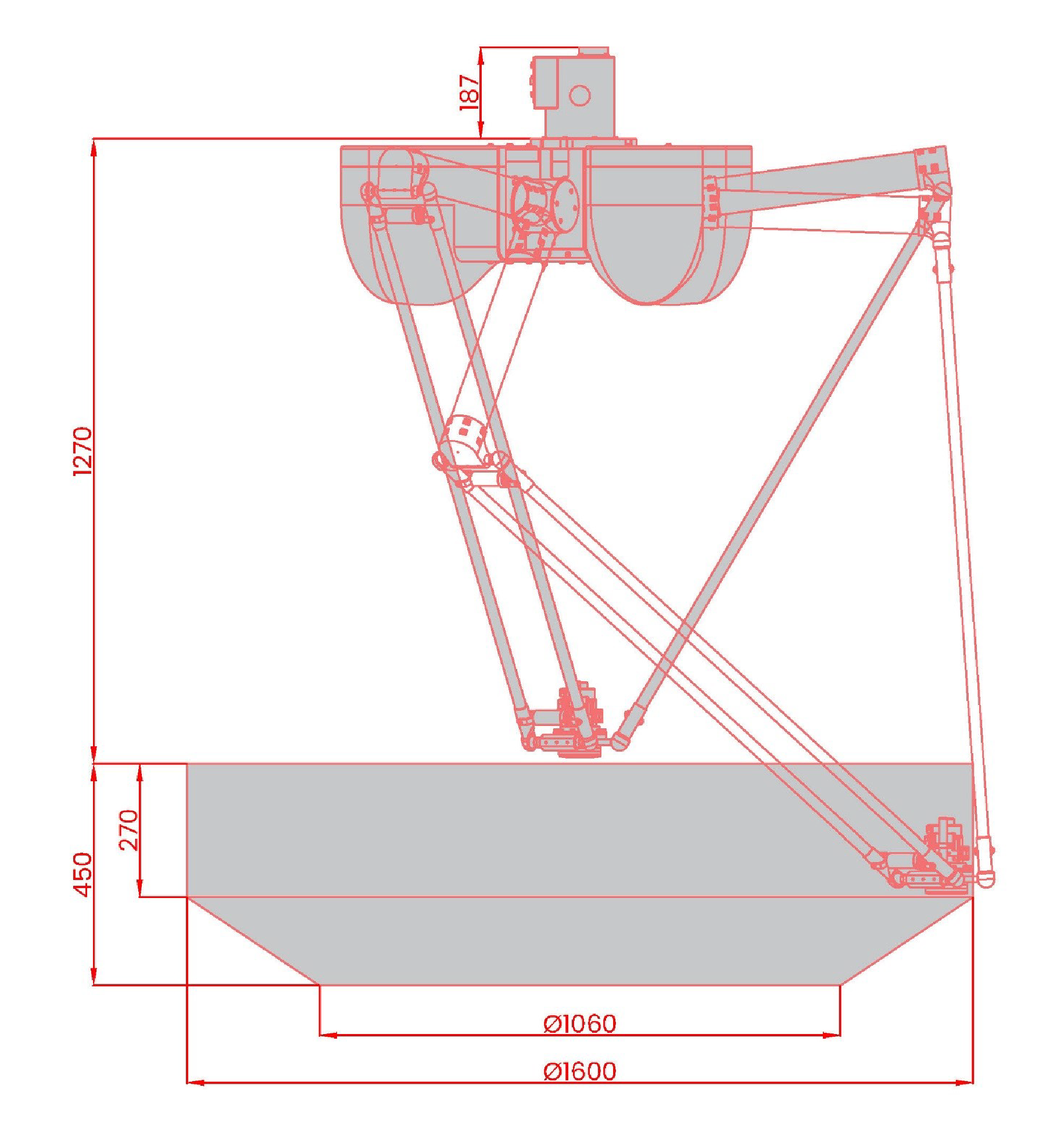
01.Dimensións e rango de traballo (mm)
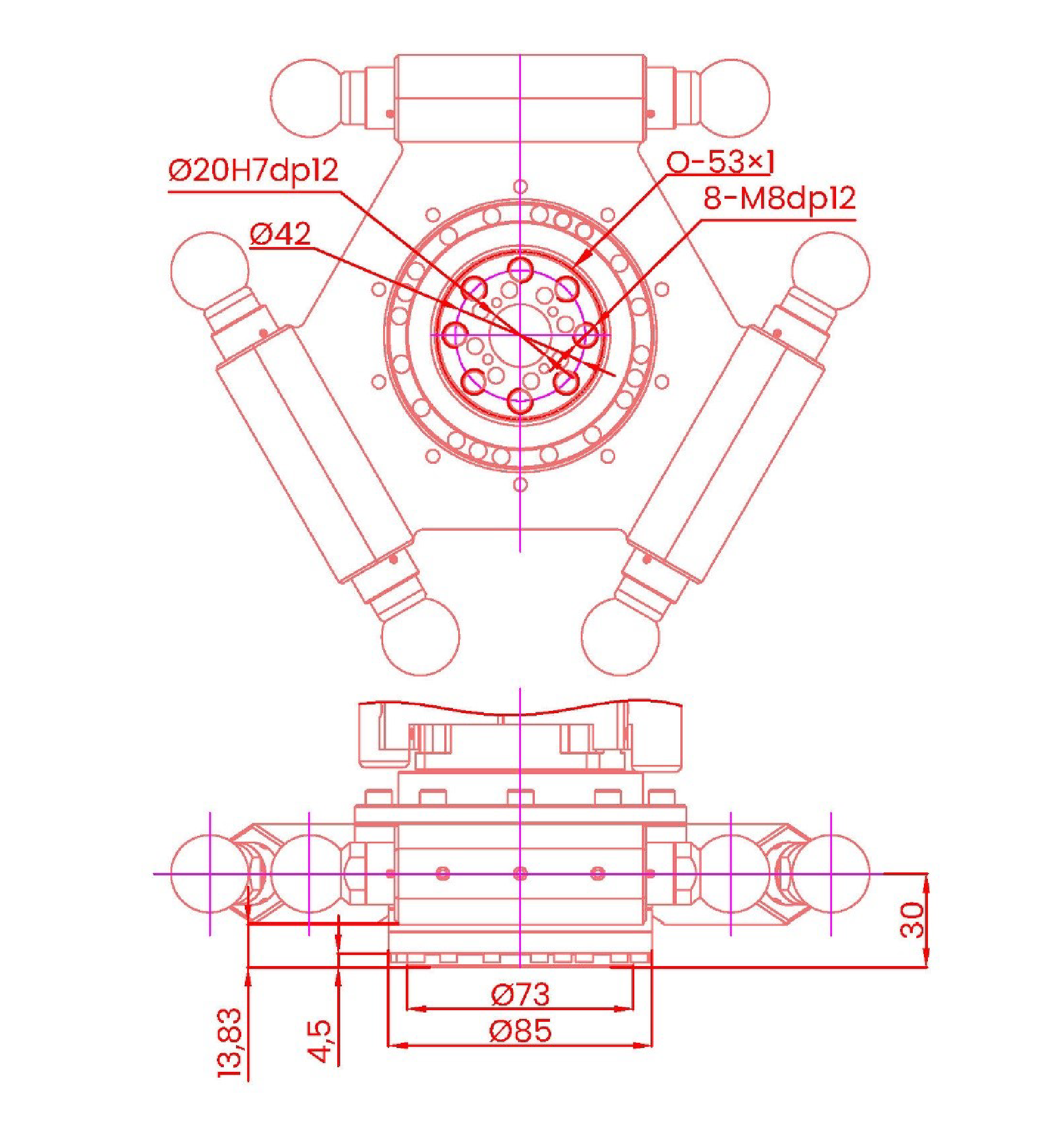
02. Brida (mm)
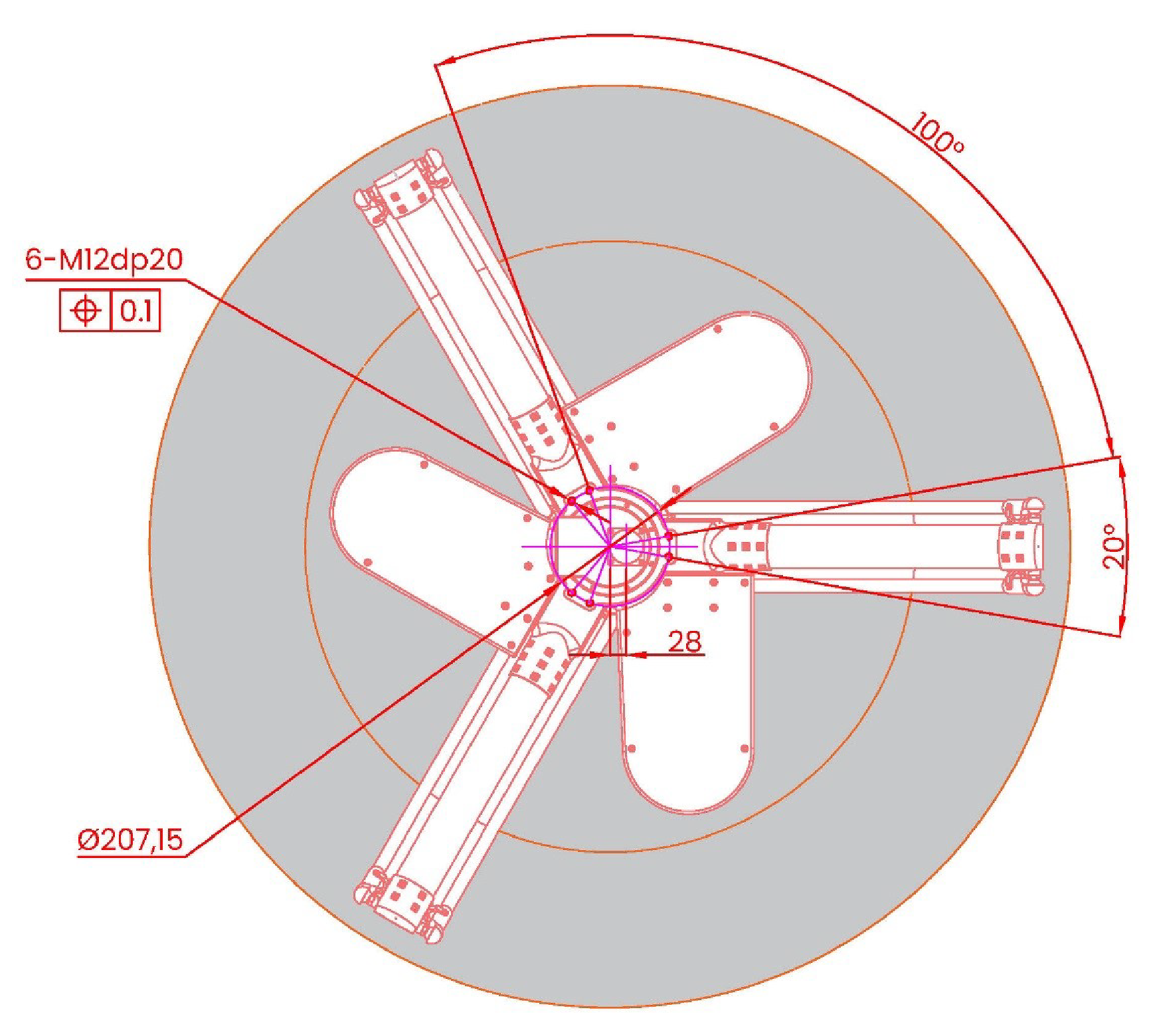
03. Instalación da base (mm)
Escribe aquí a túa mensaxe e envíanolo





